国内外相关研究表明,仅利用相对测量信息即可实现编队航天器的自主导航。其中,航天器间的相对距离信息可通过微波测距或激光测距仪测量得到,相对视线(LOS)信息可通过光学相机测量得到。利用星敏感器提供的惯性基准,将相对位置矢量转换到惯性坐标系,通过对一段时间内的相对位置矢量进行连续测量,即可确定所有成员航天器的绝对轨道要素。这种方法需要将测量信息输入到序贯滤波器中,从而实现自主导航,因此需要一定精度的航天器状态先验信息。通常,这一先验信息由地面站或星上其它导航设备进行获取。
最近,中国科学院国家空间科学中心复杂航天系统电子信息技术院重点实验室的邓丽研究员(通讯作者)与北京航空航天大学宇航学院的孙秀聪副研究员合作,提出了一种仅利用航天器相对位置矢量测量获取编队初始绝对位置的半解析定位方法。这种方法首先对一段时间内的相对位置矢量测量信息进行自适应多项式拟合,提取得到相对引力加速度信息,进而将加速度信息代入二体引力场,利用解析法求解得到编队位置的初始迭代解。再将初始解代入高阶引力场模型,利用高斯牛顿迭代法,得到编队初始位置精确解。仿真结果表明,对于三星编队场景,在测距和测角误差分别为1米和5角秒的情况下,可以实现2千米的自主定位精度。
这种方法仅利用相对测量信息,无需外部信息输入即可获取编队航天器的绝对位置,可以为编队飞行任务提供自主导航支持,特别是月球轨道编队飞行任务、深空编队飞行任务等。该项研究成果发表在AIAA(American Institute of Aeronautics and Astronautics)旗下的Journal of Guidance, Control, and Dynamics期刊上。
Citation: Xiucong Sun, Cheng Geng, Li Deng and Pei Chen, “Geolocation of Formation-Flying Spacecraft Using Relative Position Vector Measurements,” Journal of Guidance, Control, and Dynamics, published online 15 February 2022.
论文链接:https://arc.aiaa.org/doi/10.2514/1.G006377
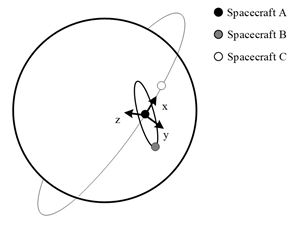
图1. 三星编队仿真场景
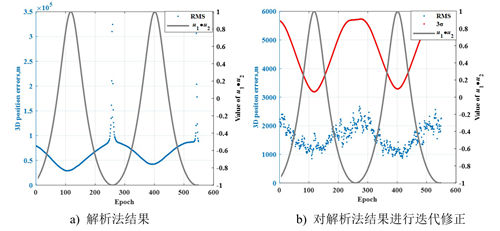
图2. 三维位置误差曲线
(供稿:系统室)